
基于单片机的模糊PID温度控制系统设计
无需注册登录,支付后按照提示操作即可获取该资料.
摘 要
温度控制在热处理工艺过程中,是一个非常重要的环节。控制精度直接影响着产品质量的好坏。本文研究的电炉是一种具有纯滞后的大惯性系统,传统的加热炉控制系统大多建立在一定的模型基础上,难以保证加热工艺要求。因此本文将模糊控制算法引入传统的加热炉控制系统构成智能模糊控制系统。
本文以模糊自整定 PID 控制算法为基础,设计以8031单片机为主体的控制系统控制电炉,构成一个能进行较复杂的数据处理和复杂控制功能的智能控制器,使其既可与微机配合构成控制系统,又可作为一个独立的单片机控制系统,具有较高的灵活性和可靠性。单片机根据输入的各种命令,进行智能算法得到控制值,输出脉冲触发信号,通过过零触发电路驱动双向可控硅,从而加热电炉。(毕业设计网 www.2bysj.cn)
本文提出的基于模糊的自整定 PID 控制算法的控制系统具有真正的智能化和灵活性,有自动检测、数据实时采集、处理及控制结果显示等功能,对提高电炉温度的控制精度具有较好的意义。
关键词:电炉;单片机;模糊 PID。
Abstract
Temperature in heat treatment craft is very important. Control precision effect directly the quality of the product. The electric stove is a kind pure great inertia system, and the traditional heat control system is based on some certain model, so is hard to satisfy the technological requirement.This paper will adopt fuzzy control algorithm to build a intelligent fuzzy control system.
In this paper, we use fuzzy self-regulated PID algorithmt to design a electric stove control system depending on mainly 8031 chip and build a intelligent controller which can process complicated data and realize complicated control functiong, meanwhile is alao regarded as an independent SCM control system which has higher flexibility and dependability. The SCM accords to all kinds input orders to carry out intelligent algorithm in order to get control value, then to feed out the pulse signal to trigger circuit and drive the two-way silicon in order to heat the stove.
The control system based fuzzy self-regulated PID algorithm has real intelligence and flexibility. The functions include automatic detection, real-time data gather and precess and displaying the control output and so on, which do well in improving the control precision.
Keyword:Electric stove;SCM;Fuzzy PID.
模糊 PID 控制
模糊控制的概念是由美国加利福尼亚大学著名教授 L.A.Zaden 首先提出的,经过20多年的发展,模糊控制取得了瞩目的成就。模糊控制适用于非线性、数学模型不确定的控制对象,对被控对象的时滞非线性和时变性具有一定的适应能力,同时对噪声也有较强的抑制作用,即鲁棒性较好。但模糊控制器本身消除系统稳态误差的性能比较差,难以达到较高的控制精度。而 PID 控制正好可以弥补其不足,近年来已有不少将模糊技术与传统技术结合起来设计模糊逻辑控制的先例。在文献中介绍了多种能提高 PID控制精度的模糊 PID 混合控制方案,例如:引入积分因子的模糊 PID 控制器;混合型模糊 PID 控制器;另外将其与其它先进控制技术结合又有模糊自适应 PID 控制、神经网络模糊 PID 控制等。[6]
模糊自整定 PID 控制
模糊自整定 PID 控制是在一般 PID 控制系统的基础,加上一个模糊控制规则环节,利用模糊控制规则在线对 PID 参数进行修改的一种自适应控制系统。它以误差e和误差变化ec作为输入,可以满足不同时刻的e和ec对参数自整定的要求。它将模糊控制和 PID 控制器两者结合起来,扬长避短,既具有模糊控制灵活而适应性强,调节速度快的优点,又具有 PID 控制无静差、稳定性好、精度高的特点,对复杂控制系统和高精度伺服系统具有良好的控制效果。(毕业设计网 www.2bysj.cn) 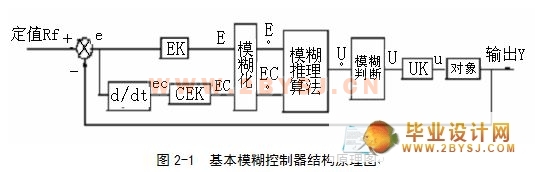
目 录
第1章 绪论 1
1.1 引言 1
1.2 控制器发展现状 1
1.2.1 PID 控制器的发展现状 1
1.2.2 模糊 PID 控制 2
1.2.3 模糊自整定 PID 控制 2
1.3 电炉采用模糊自整定 PID 控制的可行性 2
第2章 模糊自整定 PID 控制器的设计 4
2.1 模糊推理机的设计 4
2.1.1 模糊推理机的结构 4
2.1.2 模糊推理机的设计 4
2.1.2.1 精确量的模糊化 5
2.1.2.2 建立模糊控制规则和模糊关系 5
2.1.2.3 输出信息的模糊决策 6
2.2 模糊自整定 PID 控制器 6
2.2.1 PID 参数对 PID 控制性能的影响 6
2.2.2 模糊自整定 PID 控制器 7
2.3 模糊自整定 PID 控制器性能的研究 8
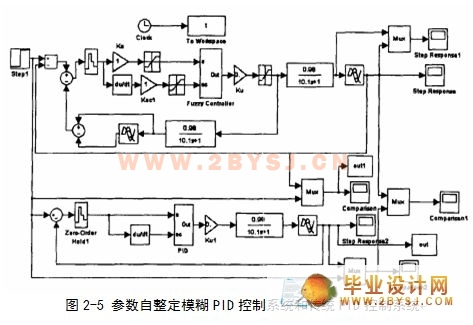
2.3.1 Matlab 仿真结构图 8
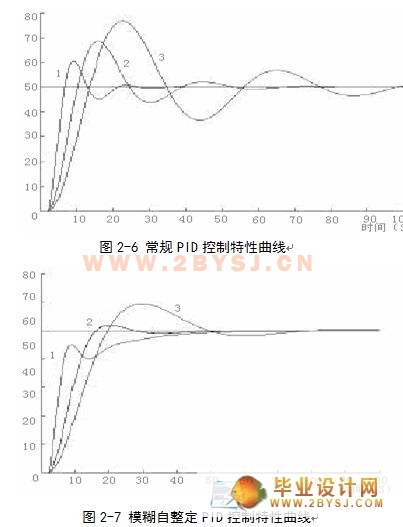
2.3.2 惯性时间常数的影响 9
2.4 仿真结果分析 10
(毕业设计网 www.2bysj.cn)
第3章 系统硬件和电路设计 11
3.1引言 11
3.2 系统的总体结构 11
3.3 温度检测电路 12
3.3.1 温度传感器 12
3.3.2 测量放大器的组成 12
3.3.3 热电偶冷端温度补偿方法 13
3.4 多路开关的选择 13
3.5 A/D转换器的选择及连接 14
3.6 单片机系统的扩展 15
3.6.1 系统扩展概述 15
3.6.2 常用扩展器件简介 16
3.7 存储器的扩展 17
3.7.1 程序存储器的扩展 17
3.7.1.1只读存储器简介 17
3.7.1.2 EPROM2764简介 17
3.7.2 数据存储器的扩展 18
3.7.2.1数据存储器概述 18
3.7.2.2静态RAM6264简介 19
3.7.2.3数据存储器扩展举例 19
3.8 单片机I/O口的扩展(8155扩展芯片) 20
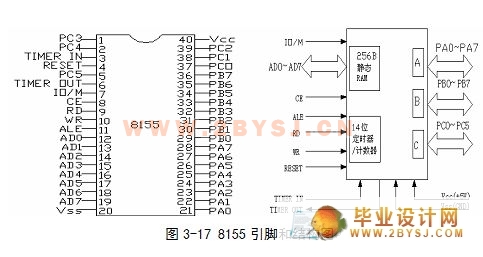
3.8.1 8155的结构和引脚 20
3.8.2 8155的控制字的及其工作方式 21
3.8.3 8155与8031的连接 22
3.9 看门狗、报警、复位和时钟电路的设计 23
3.9.1看门狗电路的设计 23
3.9.2报警电路的设计 23
3.9.3复位电路的设计 24
3.9.4 时钟电路的设计 25
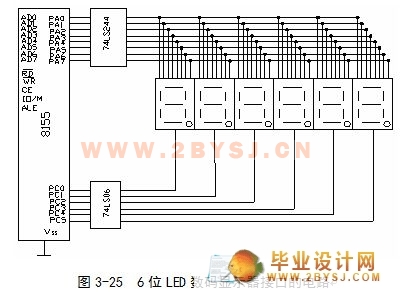
3.10 键盘与显示电路的设计 25
3.10.1 LED数码显示器的接口电路 25
3.10.2键盘接口电路 26
3.11 DAC7521数模转换接口 27
3.12 隔离放大器的设计 28
3.13 可控硅调功控温 29
3.13.1过零触发调功器的组成 29
3.13.2主要电路介绍 30
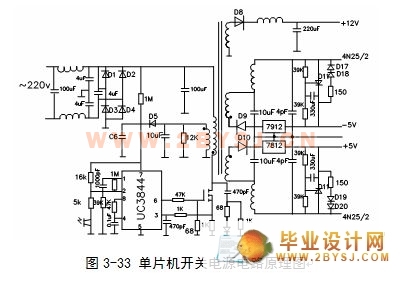
3.14 单片机开关稳压电源设计 31
第4章 系统软件设计 32
4.1 主要程序的框图 32
4.1.1主程序框图 32
4.1.2键盘中断服务子程序 33
4.1.3恒温及升温测控子程序 34
4.1.4降温测控子程序 35
4.2 模糊自整定 PID 控制算法 36
致谢 39
参考文献 40
附录 42
参考文献
[1] 徐建林,陈超.模糊控制在热处理电阻炉中的应用研究.热加工艺,2002,(5):58-60
[2] Z.R.Radakovic, V.M.Milosevic, S.B.Radakovic. Application of Temperature Fuzzy Controller in an Indirect Resistance Furnace. Applied Energy, 2002:167-182
[3] St.Boschert,P.Dold,K.W.Benz.Modelling of the Temperature Distribution in a Three-zone Resistance Furnace: Influence of Furnace Configuration and Ampoule Position.Journal of Crystal Growth,1998:140-149
[4] 王家桢编著.调节器与执行器.北京:清华大学出版社,2001:68-72,47-57
[5] 徐学峰主编.传感器变送器测控仪表大全.北京:机械工业出版社,1998:223
[6] 谢新民,丁锋编著.自适应控制系统.北京:清华大学出版社,2002:1-5,158-161
[7] 李士勇.模糊控制和智能控制理论与应用.哈 尔 滨:哈尔滨工业大学出版社,
1990:78-80
[8] 诸静等.模糊控制原理与应用.北京:机械工业出版社,1995:338-344;258-261
[9] 李卓.基于模糊推理的自调整PID控制器.控制理论与应用,1997,(2):238-243
[10] 王忠勇,蔡远利,刘文江,等.单参数 Fuzzy-PID 控制器.工业仪表与自动化装置,
1997,(4): 18-21
[11] 江新琴,陈树棠,陆向成.一种单参数模糊 PID 控制的微机励磁调节器.福建电力与电工,2002,(2):12-13
[12] 李卓,萧德云,何世忠.基于神经网络的模糊自适应 PID 控制算法.控制与决策,
1996,(3):340-345(毕业设计网 www.2bysj.cn)
[13] 纪纯.唐钢中型厂650加热炉智能模糊控制系统.[北京工业大学工学硕士论文].
1997: 53-60,14-15
[14] 刘应爽.高温电阻炉接点控制改为无接点的可控硅控制.工业计量,2001,增刊:153-154
[15] 顾明文.可控硅温控器的工作原理及故障维修.实验室研究与探索,1995,(3):74-75
[16] 郑雪梅,姜成国,周广铭.模糊PID控制器结构.大庆石油学院报,2000,24(3):46-50
[17] 张化光,何希勤.模糊自适应控制理论及其应用.北京:北京航空航天大学出版社,
2002:167-169,26-28
[18] Jen Yang. Chen. Rule Regulation of Sliding Mode Controller Design:Direct Adaptive Approach. Fuzzy Sets and Systems, 2001,120:159-168
[19] 刘金锟著.先进PID控制及其MATLAB仿真.北京:电子工业出版社,2003:1-12,7-12,67-81
[20] 张守元,黎利红.动态过程中 PID 控制参数模糊整定的探索.矿冶工程,2000,(2):22-24
[21] 张建民,王涛,王忠礼编著.智能控制原理及应用.北京:冶金工业出版社,2003:60-64
[22] 刘豹主编.现代控制理论.北京:机械工业出版社,2000:251-253
[23] 何衍庆,姜捷,江艳君,等.控制系统分析、设计和应用-MATLAB语言的应用.北京:
化学工业出版社,2002:291-296,194-205
[24] 谢元旦,夏淑艳.PID调节器参数的继电自整定方法.控制与决策,1993,8(1):77-79
[25] 谢元旦,昊胜.PID继电自整定几种算法的比较.自动化与仪器仪表,1993,(4):20-24
[26] 汪洋,褚键.一种基于递推参数估计的PID参数自整定方法.息与控制,1996,(4): 182-185
[27] 徐科军,陈荣保,张崇巍著.自动检测和仪表中的共性技术.北京:清华大学出版社,
2000:31-34
[28] 丁玉美,高西全,彭学愚.数字信号处理.西安:西安电子科技大学出版社,2000: 73-93
[29] 楼顺天,胡昌华,张伟. 基于MATLAB的系统分析与设计-模糊系统.西安:西安电
子科技大学出版社,2001:61-122
[30] 孟繁盛,杨月军,崔岩等.60S2Mn钢“零保温”淬火工艺的试验研究.阜新矿业学院
学报(自然科学版),1994,13(4):64-68
[31] 山东工业大学编著.热处理设备.山东:山东工业大学.1984:57-71
[32] 王学前.奥氏体状态控制及零保温加热工艺.四川工业学院学报,1994,13(4)23-24
[33] 王学前,霍金山.加热过程控制及透烧检测.四川工业学院学报,1997,16(1):1-8
[34] 李家昌主编.自动控制仪表.武汉:武汉工业大学出版社,1990:11-23
[35] 李明.热电偶的冷端补偿及线性处理.煤炭科学技术,1996,24(2):20-24
[36] 毕训银.热电偶参考端的几种补偿方法.仪表技术与传感器,1998,(3):29-31
[37] 张庆玲.热电偶传感器测温系统的设计应用.西北轻工业学院学报,2000,18(1):
82-85
[38] 王珏,王玉田编著.集成检测电路原理与设计.北京:兵器工业出版社,1996:22-25
[39] 张毅刚,彭喜源,谭晓军等编著.MCS-51单片机应用设计.哈尔滨:哈尔滨工业大学
出版社, 2000:75-101,152-161,88-90,241-248,294-295
[40] 罗志坤,徐植贤.串行可编程监控器件EEPROM及其应用.电子技术,1998,(12):
564-567
[41] 张智杰.AD574在数据采集中的应用国外电子元器件,2003,(6):55-56
[42] 赵负图主编.现代传感器集成电路.人民邮电出版社,2000:303-304
部分程序:
ORG 0000H
LAMP main
ORG 0003H
AJMP PINTO
ORG 000BH
Ajmp BRTO
ORG 0013H
Ajmp INT1
Main: MOV SP, 20H
CLR A
MOV 21H, A
MOV 22H, A
MOV 23H, A
MOV 24H, A
MOV 25H, A
MOV 26H, A
MOV 27H, A
MOV 28H, A
MOV 29H, A
MOV 2AH, A
MOV 2BH, A
MOV 2CH, A
MOV 2DH, A
MOV 2FH, A
MOV 30H, A
MOV 31H, A
MOV 32H, A ;显示缓冲区
MOV 33H, A
MOV 34H, A
MOV 35H, A ; 恒温温度暂存区
MOV 36H, A
MOV 37H, A
MOV 38H, A
MOV 39H, A ;升温速率暂存区
MOV 3AH, A
MOV 3BH, A ;恒温时间暂存区
MOV 3EH, A
MOV 4AH, A ;降温速率暂存区
MOV 4BH, A
MOV 4CH, A
MOV 4FH, A
MOV 50H, A
MOV 51H, A e(k-1)
MOV 52H, A
MOV 53H, A
MOV 54H, A Δe(k-1)
MOV 55H, A
MOV 56H, A
MOV 57H, A u(k-1)
MOV 58H, A
MOV 59H, A
MOV 5AH, A u(k)
MOV 5BH, A
MOV 5CH, A
MOV 5DH, A 2的单元