
助老助残爬楼梯轮椅的设计(含CAD图,PROE三维,仿真运动视频)
无需注册登录,支付后按照提示操作即可获取该资料.
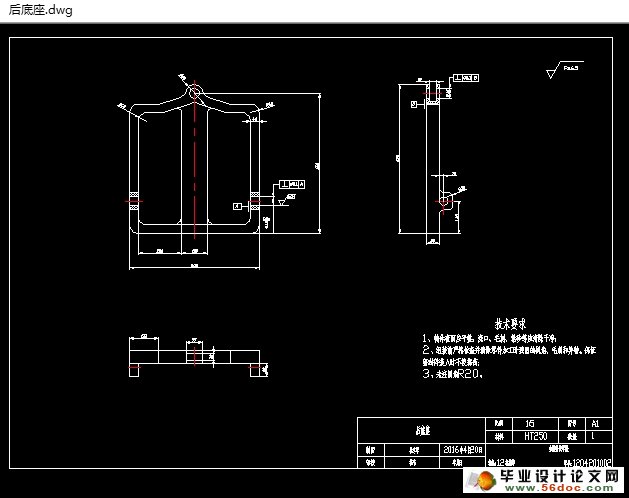
助老助残爬楼梯轮椅的设计(含CAD图,PROE三维,仿真运动视频)(任务书,开题报告,外文翻译,论文说明书10000字,CAD图纸8张,PROE三维图,仿真运动视频)
摘 要
发明楼梯在人类发展的历史具有深远的影响。不仅减少建筑面积,还能完全使用有限的空间。然而给人们带来些许生活上的不方便。伴随着我们国家人口大国的老龄化加速,老年人口的数量日益增长。那些具有残疾的老年人对残疾人轮椅的要求也逐渐升高。所以,设计一个能够适应楼梯的轮椅势在必行。
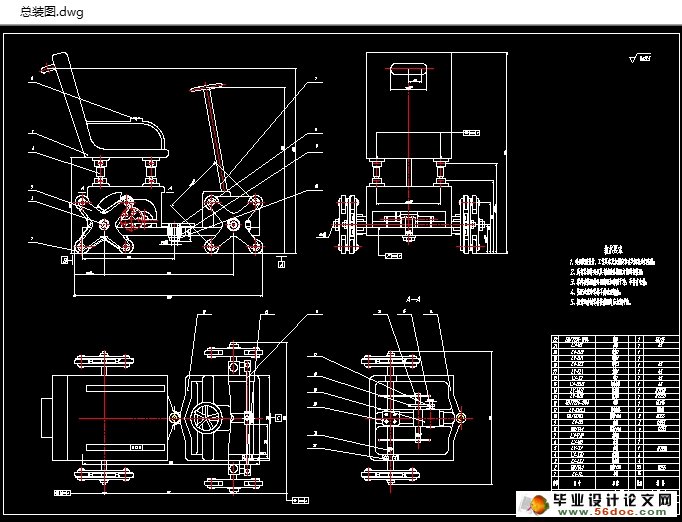
本论文主要是对爬楼梯轮椅进行研究和设计分析,主要包括国内外爬楼梯轮椅的开发现状和将来的发展情况略做介绍。利用社会调查和访问一些残疾家庭后设计出一种行星齿轮的爬楼梯轮椅。
本文建立了爬楼梯轮椅动力学三维建模,并安装了两个电动机,分别控制平地行走运动和爬楼梯运动,在此基础上,还在轮椅上安装了减速装置、减震装置以及转弯装置,增加了轮椅的稳定性和安全性。
关键词:行星轮;爬楼梯轮椅;三维建模;稳定安全性
The wheelchair design helpage assistive walking up stairs
Abstract
Invention of stairs in the history of human development has a profound impact.Not only reduce the building area, it can fully use limited space.However, bring trifling life inconvenient.Along with our country's most populous country in the accelerated aging, the number of elderly population is growing.The requirements of people with disabilities to wheelchairs for the disabled elderly people also gradually rise.So, design a wheelchair can adapt to the stairs is imperative.
This thesis mainly is the study and design of stair climbing wheelchair analysis, mainly including the development status of stair climbing wheelchair at home and abroad and talk a little on the development of the future.Using social investigation and following a visit to some disabled family designed a planetary gear stair climbing wheelchair.
This article also elaborates a stair-climbing wheelchair through dynamic 3d module. Two electric motors which control the ground walking and stair climbing movement respectively are installed in the wheelchair. Based on this, also in a wheelchair to install the reduction gear, shock absorbing device, and turning device, increase the stability and security of the wheelchair.
Keywords:Planetarywheel;Stair-climbing wheelchair;hree-dimensional module;Stable security
一、设计参数
传递功率P=0.3201(KW)
传递转拒T=45(N.M)
齿轮1转速n1=140(r/min)
齿轮2转速n2=183(r/min)
传动比i=6.5
预定寿命H=18000(小时)
二、材料及热处理
齿面啮合类型GFace=软齿面
热处理质量级别Q=ML
齿轮1材料及热处理Met1=34CrNi3Mo(调质)
齿轮1硬度取值范围HBSP1=319-387
齿轮1硬度HBS1=333
齿轮1材料类别MetNI=0
齿轮2材料及热处理Met2=45(调质)
齿轮2硬度取值范围HBSP1=231-276
齿轮2硬度HBS2=242
齿轮2材料类别MetN2=0
三、齿轮精度
齿轮1精度JD1=7
齿轮1齿厚上偏差JDUI=F
齿轮1齿厚下偏差JDDI=L
齿轮2精度JD1=7
齿轮2齿厚上偏差JDUI=F
齿轮2齿厚下偏差JDDI=L
四、齿轮基本参数
总变位系数Xsum=0.0000
标准中心距A0=26.0000
实际中心距A=26.0000
齿顶高系数ha=1.00
顶隙系数c=0.27
压力角a=20(度)
端面齿顶高系数hat=1.00000
端面顶隙系数ct=0.25000
端面压力角at=20.0000000(度)


目 录
摘 要 II
Abstract III
1 绪 论 1
1.1 引言 1
1.2 比较国内外轮椅发展情形 1
1.3 本毕设的研究方向 3
2 轮椅方案设计选择 5
2.1 概述 5
2.2 方案设计 6
2.3 设计方案三 10
2.4 本章小结 12
3 关键零部件检验跟校核 13
3.1 功率估算 13
3.2 分别计算齿轮1跟2的齿数及模数 14
3.3 后链轮的计算 16
3.4 计算各轴的强度 18
4 电动驱动轮椅的适应条件 20
4.1 轮椅使用条件 20
4.2 电机的选用 20
5 爬楼梯轮椅机构运动分析 21
结论 23
参考文献 24
附 录 25
致 谢 31