
游泳池清刷机器人结构设计(含CAD零件装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
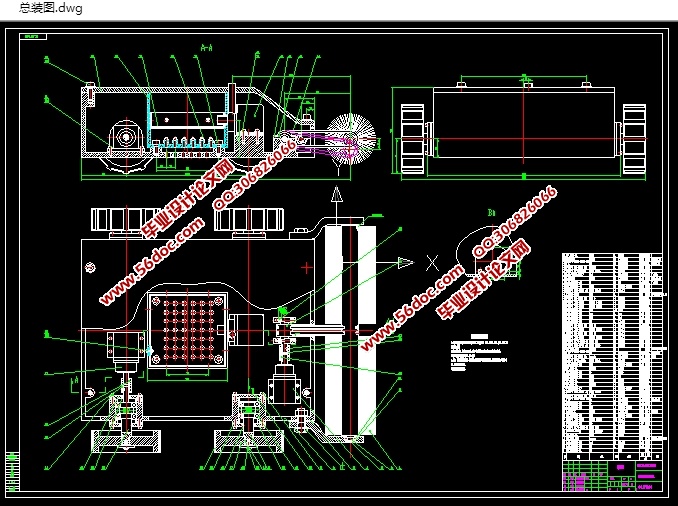
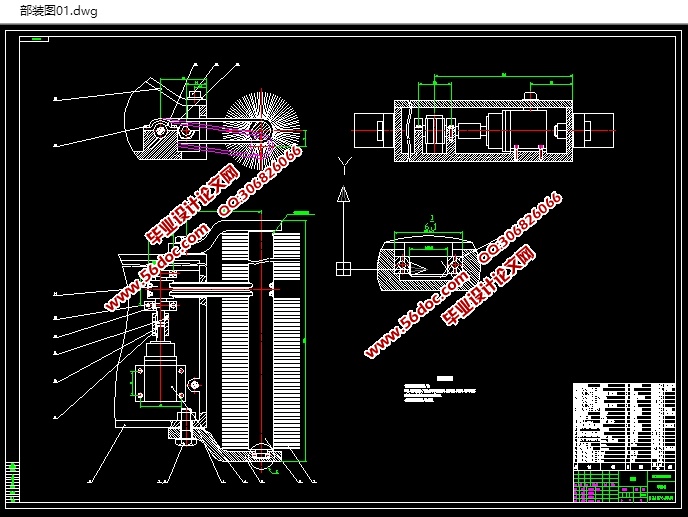
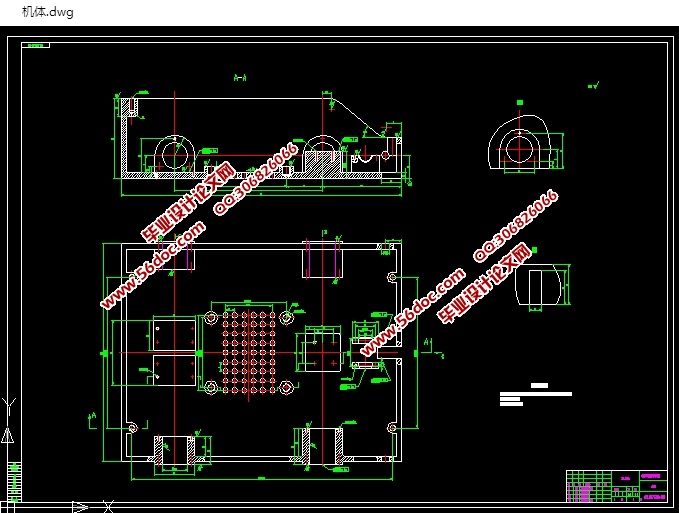
游泳池清刷机器人结构设计(含CAD零件装配图)(任务书,开题方案论证报告,外文翻译,设计说明书18500字,CAD图8张)
主要技术性能指标
(1) 吸附方式:推力吸附;
(2) 移动方式:轮式;
(3) 移动速度:2~8m/min;
(4) 控制方式:有线遥控;
(5) 负重能力:不小于200N;
(6) 工作壁面:水面以下表面。
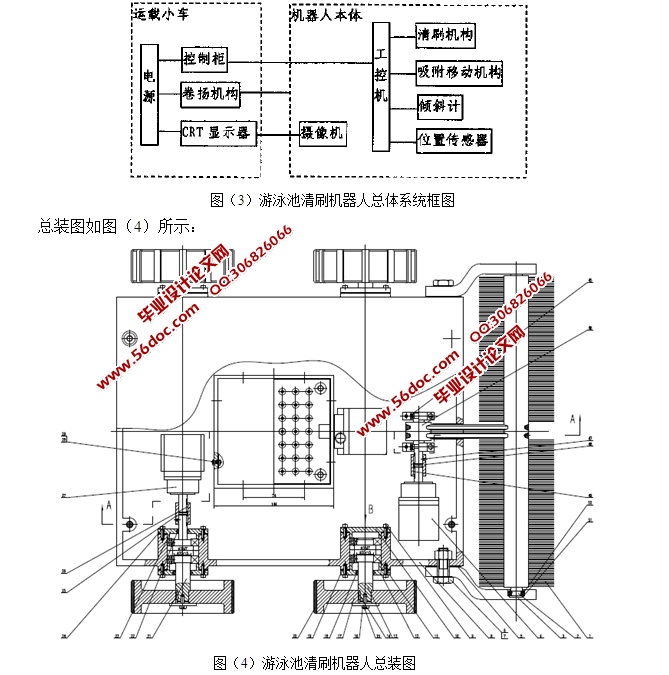
4. 2方案组成及工作原理
游泳池清刷机器人可分为机械本体、清刷作业装置、过滤装置和控制系统四部分,其工作原理为:在游泳池池边上放置有一个可自由移动的运载小车,小车上装有控制箱,通过控制总线,可控制游泳池清刷机器人自动在游泳池池底和四周侧面移动。小车上有控制柜,CRT显示器,动力源及卷扬装置。动力源可为水下机器人的移动和清刷作业提供动力,当游泳池清刷机器人清刷四周侧面时,卷扬装置可为机器人的上下移动提供平衡力,并及时地收放保护缆绳,为机器人提供安全保障条件,同时为机器人输送动力和控制电缆。显示器通过安装在机器人本体上的摄像机,实时地显示机器人的工作环境,便于操作者掌握机器人的工作状态。机器人从运载小车爬下游泳池,先按从上至下的路径移动,当到达游泳池池底时,机器人向前运动,然后向后移动,走“之”字形。过滤装置为水泵和过滤箱组成,水泵将过滤的清水抽出,使箱内产生负压将池内的浊水引入过滤箱内,同时水泵向清刷机器人移动平面垂直的方向喷水,因此具有反冲力,使机器人紧压在移动平面上。清洗刷具由一个电机单独驱动做逆向旋转运动,机器人边移动边清刷,如此往复,完成清刷工作,其总体系统框图如图(3)所示。


目次
1引言 4
2国内外水下清刷机器人的发展状况 4
2.1 国外水下清刷机器人的发展状况 4
2.2国内水下清刷机器人的发展状况 6
3.实地调研 7
4总体技术方案 8
4. 1主要技术性能指标 8
4. 2方案组成及工作原理 8
5 机械本体技术方案分析 9
5.1吸附方式的选择 9
5.2移动方式选择 11
5.3四轮式移动机构的研究 12
5.4电机的选择 15
6清刷机构的设计 19
6.1刷丝的选择 19
6.2游泳池清刷机构的结构设计 19
6.3游泳池清刷机构动力学模型建立 21
7过滤装置设计 25
7.1过滤装置结构设计 25
7.2水泵的选择 26
7.3过滤材料的选择 27
7.4过滤箱 28
8关键零件的设计与校核 29
8.1驱动轴设计 29
8.2从动轴设计 32
8.3带轮轴设计 35
8.4轴承的校核 38
9控制系统方案设计 40
9.1步进电机的工作原理 40
9.2设计方案 40
10.密封和防腐结构的设计 41
11总结 42
致谢 44
参考资料 45