
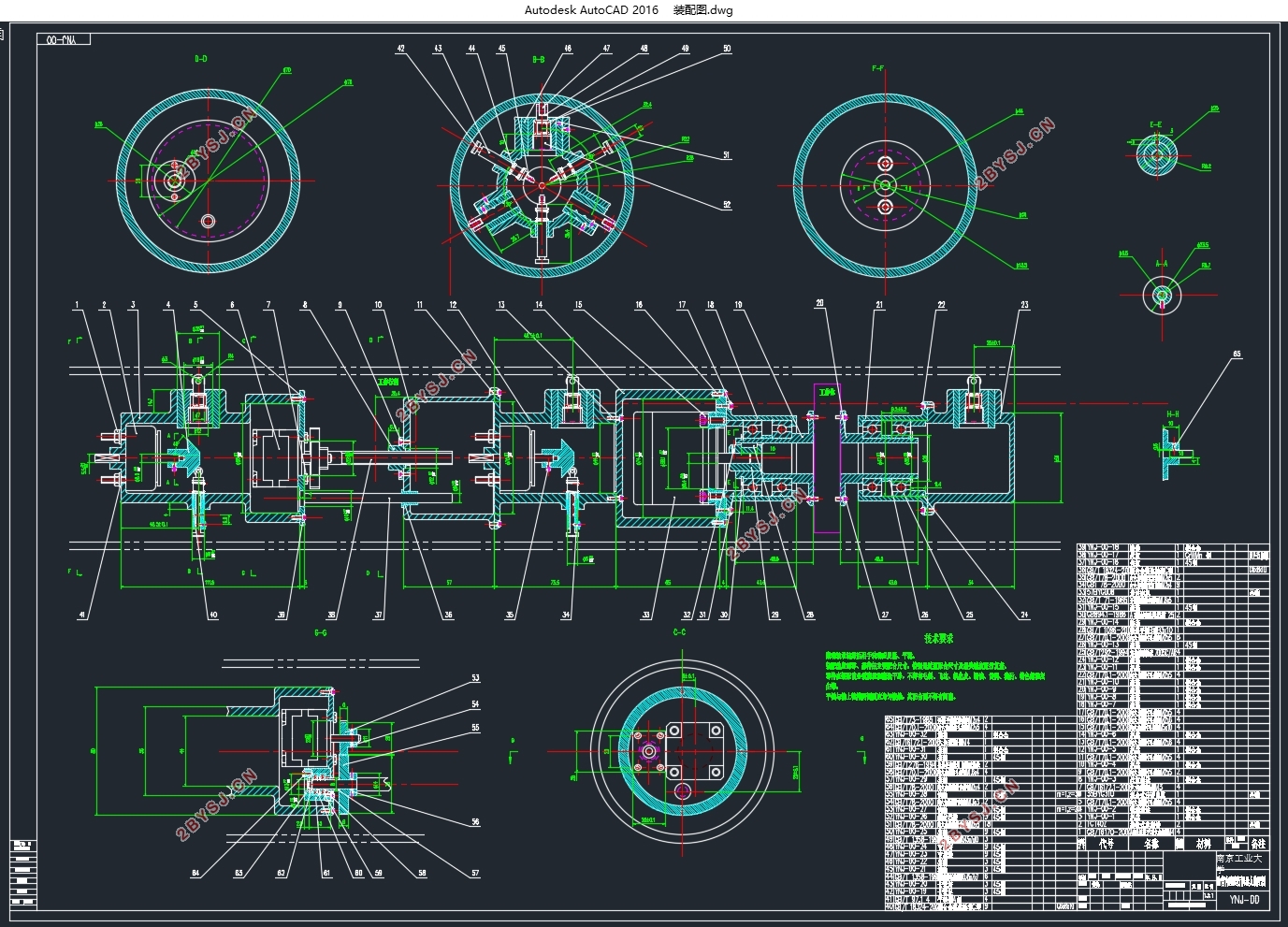
油管内壁爬行机器人的设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
油管内壁爬行机器人的设计(含CAD零件图装配图)(论文说明书12000字,CAD图5张)
摘 要
这篇论文介绍了一种检查大口径管道焊接连接的机器人系统,它被发展作为X射线实时图象检查法 [RTIIT]的自动化平台。该机器人在管道内可以独立寻找并确定焊接接缝位置,在同步控制技术的控制下可以完成对焊缝进行质量检验的任务。该机器人系统安装有一个小的焦点和具有定向波束的X射线管,因此可以获得清晰度较高的焊接接缝图像。关于该机器人系统个别的关键技术也将被详细说明。
关键词:X射线探伤 实时影象 机器人
Key Techniques of the X2ray Inspection Real-timeImaging Pipeline Robot
ABSTRACT
This paper presents a robotic system for weld-joint inspection of the big-caliber pipeline , which is developed for the purpose of being utilized as automation platform for X-ray real-time imaging inspection technique (RTIIT) . The robot can perform autonomous seeking and locating of weld-seam position in-pipe , and under the control of synchro-follow control technique it can accomplish the technologic task of weld inspection. The robotic system is equipped with a small focal spot and directional beam X-ray tube ,so the higher definition image of weld-seam can be obtained.Several key techniques about the robotic system developed are also explained in detail .
Key words : X-ray inspection ; real-time imaging ; robot
2.1 总体选择
总体上,本次设计主要采用机械结构设计来完成指定的动作,而用电气设计来控制这些动作。
2.2 前进方案的选择
目前在管道内机器人的行进方式多种多样,本设计采用蠕动式行进的方式。前进方案由旋转式步进电机、直线式步进电机、气缸中进行选择。现将3种方式在本设计中的应用进行比较。由于本设计前进方式为直线,所以其中使用直线式电机最为简便,直线电机的电机轴是丝杠形式的,于是可以通过丝杠的导程来计算机器人的行进距离。
使用旋转式步进电机的原理与直线式步进电机相似,可通过一个小型连轴器与丝杠相连组成一个直线式步进电机,也可以通过一组齿轮减速器将丝杠与电机轴相连

目 录
摘 要 I
ABSTRACT II
第一章 绪论 1
1.1 研究目的与背景 1
1.2研究现状和发展趋势 1
第二章 方案的结构选择 5
2.1 总体选择 5
2.2 前进方案的选择 5
2.3 卡紧方案的选择 5
2.4 旋转方案的选择 8
2.5 调节方案的选择 8
2.6 结构方案改进 10
第三章 主要部件的计算选择 12
3.1 步进电机的选择 12
3.2 推拉式电磁铁的选择 14
第四章 关键件的校核和驱动系统设计 17
4.1 丝杠的校核 17
4.2 轴承的校核 17
4.3 键的校核 17
4.4驱动系统设计 18
第五章 机器人工作过程 20
第六章 控制系统的设计 21
6.1 电磁铁及步进电机的控制 21
6.2 控制系统的硬件设计 21
第七章 结论与展望 28
参考文献 29
致 谢 30