
辅助人工采摘苹果装置设计(含CAD零件装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
辅助人工采摘苹果装置设计(含CAD零件装配图)(开题报告,中期检查报告,外文翻译,论文说明书11000字,CAD图7张)
摘要:目前,世界上各国对于果园收获机器人的研究虽然很多,但由于果园环境复杂,自动导航辨识系统工作时的准确率并不是很高,所以全自动智能化作业采摘苹果设备并没有大规模地应用到实际生产生活中,而农民阶层从古时候到现代一直都属于收入偏低的一群人,他们挣钱的方式就是靠自己纯粹的体力劳动来换取报酬,这也是在我国高度智能化农业机械未能大规模应用的重要原因之一,再加上我国从建国到如今科技飞速发展的时间并不是很长,在农机这方面的投入比重也是从最近几年才开始增加,所以,现阶段内其实是很需要有一种农业机械来代替人力完成繁重的果园劳作,这次的毕业设计课题从某种意义上来说,也是对这个领域的一种探索,而且家里的主要经济来源也是依靠苹果园林,本身也希望未来能够有这么一种机械问世以减轻父母身上的重担,所以这次的毕业设计是很有意义的。
抛开我国的智能化采摘机械设备研究进展程度不说,但就其成本而言,一台成熟的智能采摘设备对于果农而言,它的价格是无法接受的。而市面上常见的一些简易采摘器又无法完全承担起整个采摘任务,减轻果农的劳动强度,希望能够通过本次的毕业设计课题改善这种情况。本次毕业设计的主要内容包括:
首先,从搜集的资料来看,关于辅助人工采摘苹果的研究很少,所以很多地方了参考国内外关于苹果采摘机器人的设计思路,提出本次课题设计研究的基本原则。其次结合果园实际情况,以整个装置中的采摘机构为主进行设计工作,同时对其他各部分机构进行了具体的结构设计,除此之外,还结合果园植株的实际生长情况对装置的各部分零件的参数规格进行了计算,利用所学知识对整个装置的伸缩杆进行稳定性校核,以及对主要零件进行强度校核,确保方案的可行性。然后利用现有的仿真软件Creo 2.0对辅助人工采摘苹果装置进行模拟仿真,做出整个装置的三维效果图,对照实际果园采摘情况进行分析,改进方案,同时利用工程制图软件CAD软件绘出辅助人工采摘苹果装置的装配图及各部分主要零件的零件图,使整个方案设计更加严谨,准确。
关键词:采摘器;伸缩杆;农业机械;模拟仿真;苹果
Design of the device for assisted artificial picking of apples
Abstract:At present, there are many researches on orchard harvesting robot in the world, but because of the complexity of orchard environment, the accuracy of automatic navigation and identification system is not very high. So the fully automatic and intelligent apple picking device has not been applied to actual production and life on a large scale, and the peasant class has been a group of people with low incomes from ancient times to modern times. Their way of earning money is to rely on their own pure physical labor in exchange for remuneration, which is one of the important reasons why highly intelligent agricultural machinery has not been applied on a large scale in our country. In addition, the period between the founding of the people's Republic of China and the rapid development of science and technology in our country is not very long. The proportion of agricultural machinery in this area has also increased in recent years. Therefore, at this stage, we really need a kind of agricultural machinery instead of manpower to complete heavy orchard work. In a sense, this graduation project is also an exploration of this field, and the main source of income of the family is also dependent on the apple garden. I hope there will be a machine to lighten the burden on my parents in the future, so this graduation project is very meaningful.
Aside from the research progress of intelligent harvesting machinery in China, the price of a mature intelligent picking equipment is unacceptable to fruit farmers in terms of its cost. And some common simple pickers in the market can not fully undertake the task of picking, reduce the labor intensity of fruit farmers, hope to improve this situation through the graduation project. The main contents of this graduation project include:
First of all, according to the collected data, there is little research on artificial apple picking, so many places refer to the design ideas of apple picking robot at home and abroad, and put forward the basic principles of this subject design research. Secondly, according to the actual situation of orchard, the picking mechanism of the whole device is used as the main design work, and the other parts of the mechanism are designed concretely, in addition, According to the actual growth of the orchard plant, the parameter specifications of each part of the device are calculated, the stability of the telescopic rod of the whole device is checked by using the knowledge learned, and the strength of the main parts is checked, and the strength of the main parts is verified. And then using the existing simulation software Creo 2 to simulate the artificial picking Apple device, make the three-dimensional effect map of the whole device, analyze the actual orchard picking situation and improve the scheme, and draw the assembly drawing of the auxiliary artificial picking Apple device by using the software CAD software of the engineering drawing software. The parts drawing of the main parts of each part makes the whole design more rigorous and accurate.
Keywords:Picking device, telescopic rod, agricultural machinery, apple
辅助人工采摘苹果装置工作过程简介
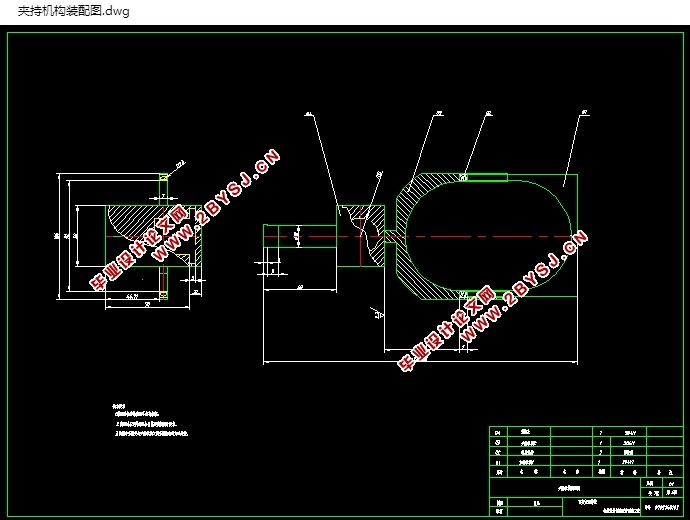
果农在采摘苹果时首先确定采摘对象,然后利用夹持机构将苹果纳入采摘范围,利用钢丝绳拉动弹簧,使夹持机构收紧从而固定住苹果,进而利用夹持机构上部的刀架部分剪断果柄,放松夹持机构,使苹果落入中空布袋掉入收集筐中,完成采摘过程。
目录
1 绪论 1
1.1 辅助人工采摘苹果装置的研究背景 1
1.2 国内外研究现状及发展趋势 1
1.2.1 国外研究成果现状: 1
1.2.2国内研究现状: 2
1.3 辅助人工采摘苹果装置研究的目的和意义 3
1.4 研究内容和方法 3
2 辅助人工采摘苹果装置研究方案设计 4
2.1 苹果生长特性环境及果园实际种植现状 4
2.2 辅助人工采摘苹果装置总体设计 4
2.2.1 辅助人工采摘苹果装置整机机构方案设计 5
2.2.2 辅助人工采摘苹果装置工作过程简介 5
3 辅助人工采摘苹果装置采摘执行机构的设计 7
3.1 伸缩杆设计 7
3.1.1 伸缩杆结构设计 7
3.1.2伸缩杆设计计算及校核 8
3.2 采摘头连接装置设计 10
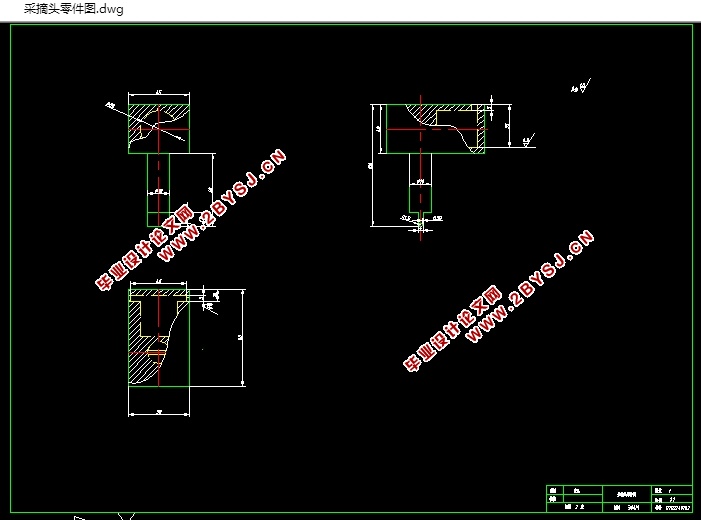
3.3 采摘头设计 10
3.3.1 夹持机构 10
3.3.2 切割机构 11
3.3.3 传动控制 13
4 果实安全传输装置的结构设计 14
5 辅助人工采摘苹果装置运输机构的选择 16
6 采摘机构受力分析及弯曲切应力强度校核 17
7 部位仿真模拟分析 20
7.1软件介绍 20
7.2绘制零件图 20
总结 25
参考文献 26
致 谢 27
附录 30