
越障机器人的结构设计(含CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
越障机器人的结构设计(含CAD零件图装配图)(任务书,开题报告,论文说明书20000字,CAD图6张)
摘要
综合分析了越障机器人的国内外现状,对履带式、腿式、轮式三种主要越障形式的优缺点进行了比较,在观察分析目前越障机器人结构和设计经验的基础上,进行多种方案的设计对比,并在此基础上提出了一款四履带双摆臂越障机器人。
本文以四履带双摆臂机器人为对象,从运动学的角度,描述了机器人在越障时的动作规划流程,考虑机器人在越障过程中质心的变化规律,再以摆臂的动作和与障碍物的特殊接触姿态为几何约束关系,用数学方法分析了机器人对于台阶、斜坡、沟壑的通过性,得出了最大越障高度、最大斜坡角度、最大沟壑宽度的参数,并建立模型导入Adams进行运动学仿真,进一步验证越障的功能性,通过仿真的后处理输出曲线,分析机器人越障过程中的多种影响因素,为优化越障机器人的越障性能提供了参考理论依据。
关键词:四履带双摆臂 越障 运动学 Adams仿真分析
Abstract
A comprehensive analysis of the current situation at home and abroad of obstacle-detecting robots, comparing the advantages and disadvantages of the three types of tracked, legged, and wheeled obstacles, and observing and analyzing the current structure and design experience of obstacle-absorbing robots, performed many Based on the comparison of the design of the scheme, a four-track double-arm swing obstacle-obsessing robot is proposed on this basis.
In this paper, the four-crawler double-arm robot is taken as the object. From the kinematics point of view, the motion planning process of the robot during obstacle crossing is described. The change rule of the center of gravity of the robot during the obstacle-obstacle process is considered, and the motion and obstacles of the swing arm are taken into account. The special contact attitude of the object is the geometric constraint relationship. The passage of the robot to steps, slopes, and ravines is analyzed mathematically, and the parameters of the maximum obstacle height, the maximum angle of the slope, and the maximum width of the ravine are obtained, and a model is built to import Adams. Kinematics simulation further validates the functionality of obstacles, and through the post-processing output curve of the simulation, analyzes the various influencing factors in the process of robot obstacles, and improves the reference theoretical basis for optimizing the obstacle avoidance performance of obstacle-surpassing robots.
Keywords: four track double swing arm obstacle kinematics Adams simulation analysi
目录
第1章绪论 1
1.1 引言 1
1.2研究的背景以及意义 1
1.3国内外发展现状 2
第2章越障机器人的结构分析,功能实现 6
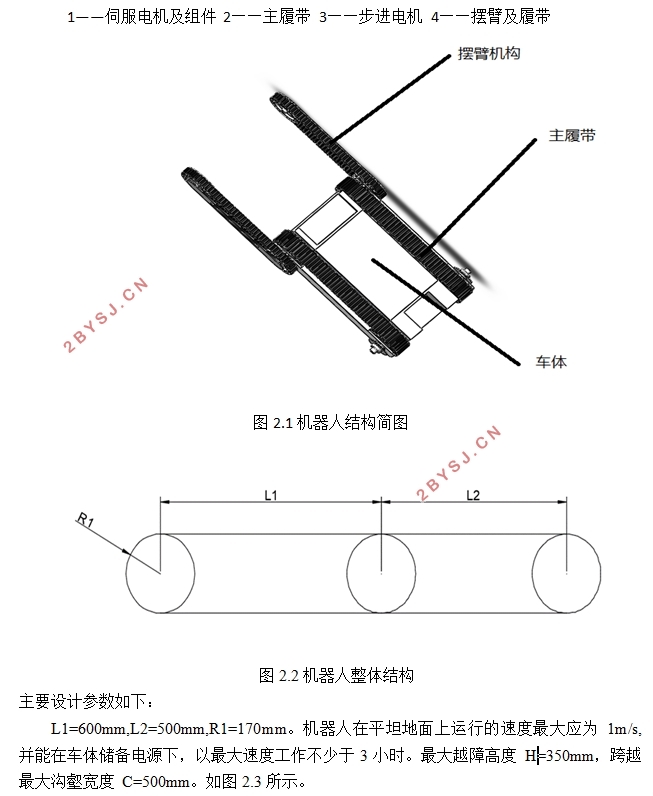
2.1 越障机器人的设计要求 6
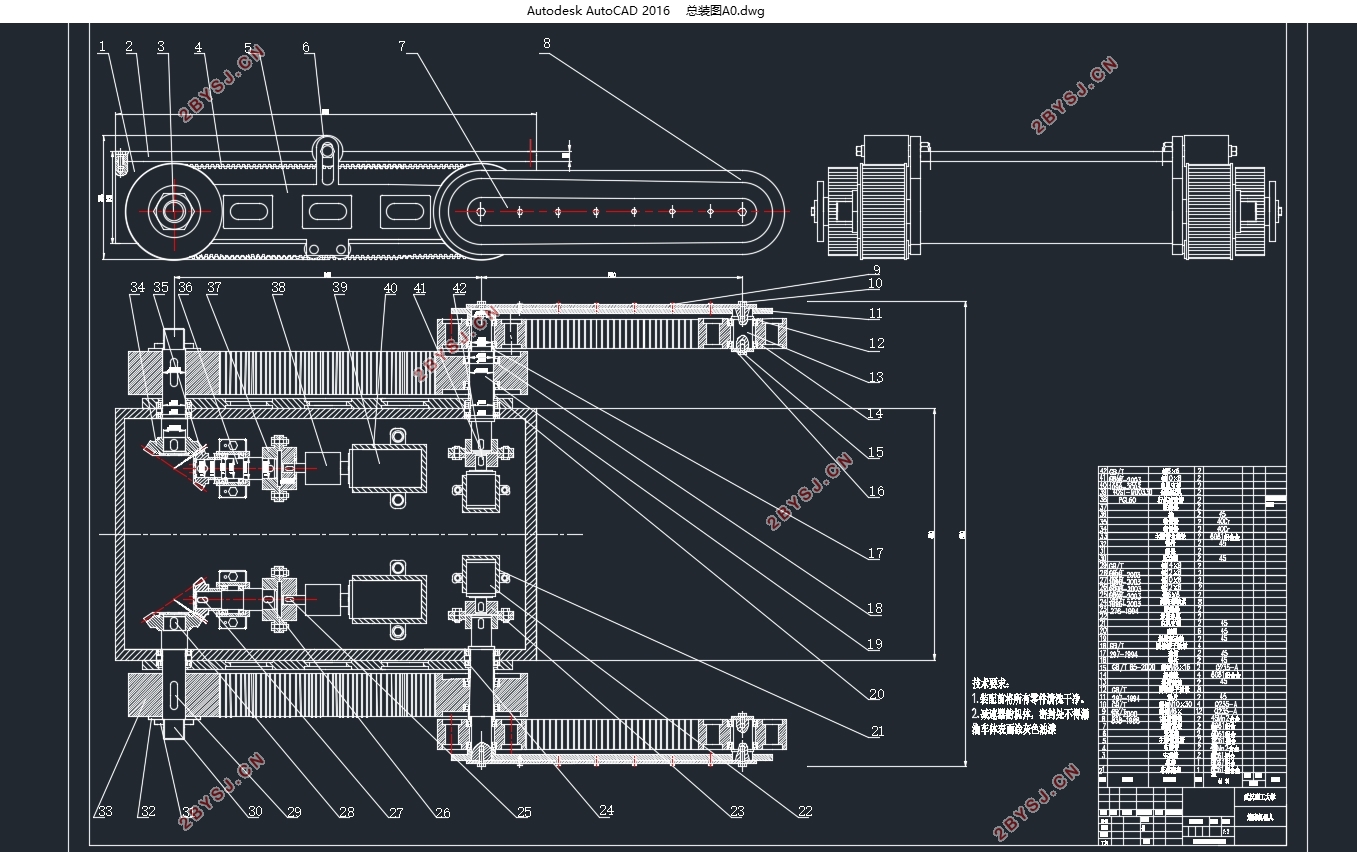
2.2 本次所采用的越障机器人结构设计 7
2.3越障机器人的基本运动特性 9
2.4越障的能力分析 11
2.4.1越障机器人跨越台阶的分析 11
2.4.2越障机器人跨越沟壑的分析 13
2.4.3越障机器人跨越斜坡的分析 15
第3章越障机器人的组成部件选择 16
3.1 驱动电机的选择 16
3.2 减速器的选择 19
3.2.1 减速器应该满足的要求 19
3.2.2 减速器的分类与选择 20
3.3移动机构主履带的设计 21
3.3.1 履带的选择 21
3.3.2 同步带的物理机械性能 23
3.3.3 计算确定主动轮直径,从动轮直径 23
3.3.4 计算确定节线长度 24
3.3.5 计算确定设计功率为 的所需带宽 24
3.4 主履带主动轮,从动轮的设计 25
3.4.1 履带主从动轮材料的选择 25
3.4.2履带主从动轮的形状以及主要尺寸的确定 25
3.4.3履带轮齿形,齿面宽度的选择 26
3.5 摆臂机构设计 27
3.5.1 摆臂机构主体的设计 27
3.5.2 摆臂履带的计算设计选择 27
第4章越障机器人的控制系统 29
4.1 系统整体方案 29
4.2伺服电机的控制 29
4.3步进电机的控制 30
第5章越障机器人的仿真分析 31
5.1Adams软件的介绍 31
5.2机器人的运动学分析 31
5.2.1模型的建立 31
5.2.2 仿真分析 31
5.2.3后处理曲线分析 37
第6章总结与展望 41
6.1 全文总结 41
6.2 设计展望 41
参考文献 43
致谢 45